Soft Manipulator

Xiaojiao Chen陈晓蛟
PhD of Mechanical Engineering
My research interests include design, modeling and control of various soft pneuamtic robotics.
Publications
Design and Modeling of an Extensible Soft Robotic Arm
A novel kinematic modeling method of a soft continnum arm consisting of 6 bellows.

Soft-Actuator-Based Robotic Joint for Safe and Forceful Interaction With Controllable Impact Response
A soft robotic joint with variable stiffness control and adjustable collision response.

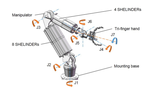
A robotic manipulator design with novel soft actuators
Design of a 6-DOF soft manipulator driven by 12 bellows.