Soft Actuators
Xiaojiao Chen陈晓蛟
PhD of Mechanical Engineering
My research interests include design, modeling and control of various soft pneuamtic robotics.
Publications
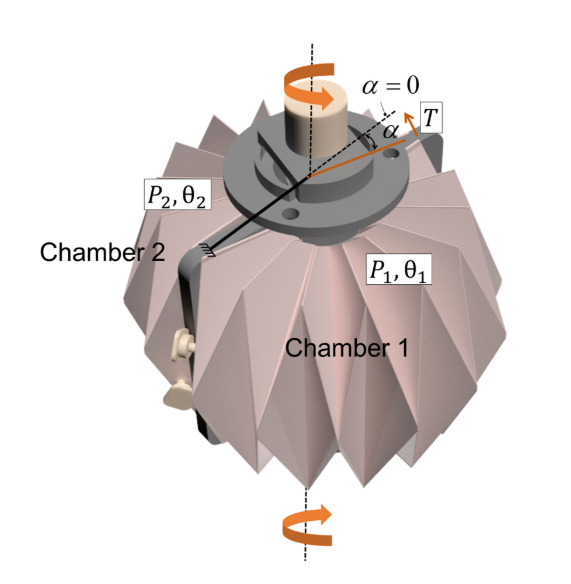
Customizable Three-Dimensional-Printed Origami Soft Robotic Joint With Effective Behavior Shaping for Safe Interactions
An 3D printed origamic soft robotic joint with enhanced strength, servo performance, and impact behavior shaping

Fiber-Reinforced Origamic Robotic Actuator
A novel pneumatic soft linear actuator Fiber-reinforced Origamic Robotic Actuator (FORA) is proposed.

A Three-Dimensional-Printed Soft Robotic Glove With Enhanced Ergonomics and Force Capability
This letter presents a novel soft robotic glove system for assistive and rehabilitative applications, offering a powerful, low-profile, …
