Abstract
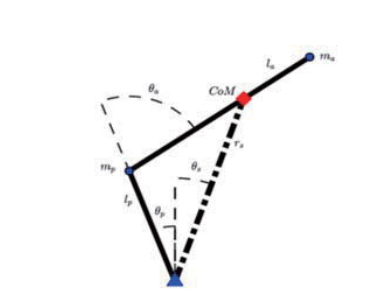
To provide a high level dynamic stability objective for humanoid robots that takes into consideration forces due to joint coupling, we derive an analytical solution to the dynamic balance control of the Acrobot, a fixed-base underactuated inverted double pendulum. We will show that the proof for stability involves an analogy to the dynamic stabilization of a rigid pendulum through vertical vibrations of its base, thus providing physical and mathematical insights into controls and dynamic stability of underactuated, articulated systems like the humanoid robot.
Type
Publication
In 2018 IEEE International Conference on Real-time Computing and Robotics